← Back to Home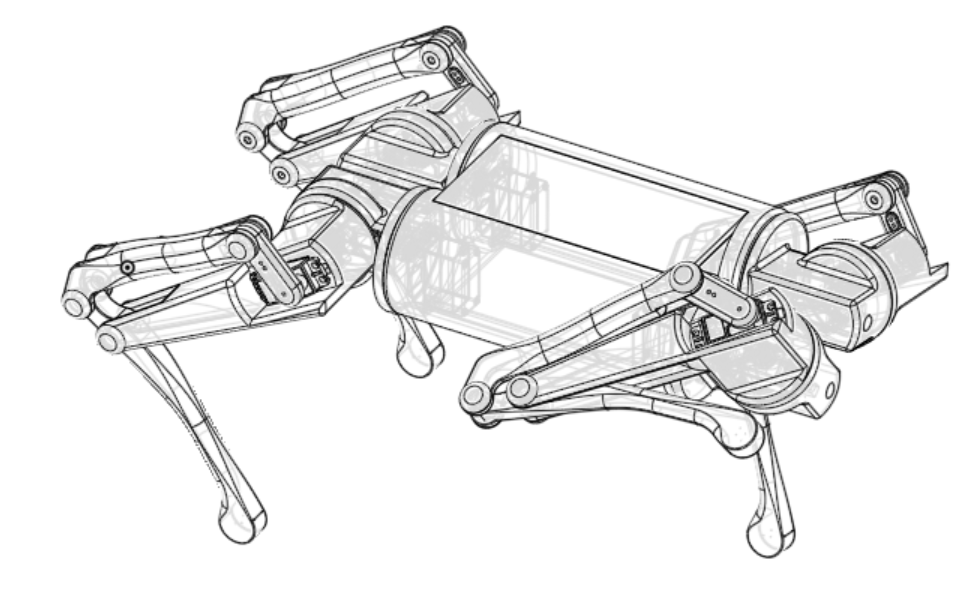
SHAPEBot
An Arduino-based quadruped that can walk, run, and dance.
Resources
Time Spent
60 hours
Lines of Code
Arduino C++: 1100
Technologies
Arduino
OnShape
Prusa Slicer
ESP32
About This Project
I cadded, built, and programmed this quadruped for Columbia Engineering's SHAPE outreach program. It uses 12 servos and a set of inverse kinematic functions to control each leg. It is controlled by an Arduino ESP32 microcontroller and communicates with the servos over a serial connection. The code and CAD files are available on the project's GitHub page.